




Bio Medical & personal assistance
Showing 13–18 of 18 results
-
AC magnetic field detection system applied to motion tracking
0,00 € Add to downloads -

Long stroke/High resolution tip tilt mechanism
0,00 € Add to downloads -
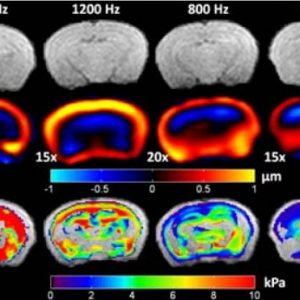
Frequency Dependence of Mouse Brain Tissue Stiffness Measured in vivo with MR Elastography
0,00 € Add to downloads -

Design of a dynamic tribometer applied to piezo inertia drive motors
0,00 € Add to downloads -
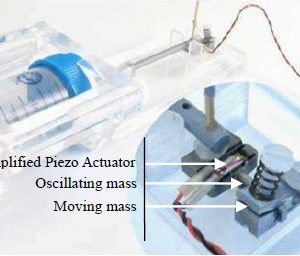
Design of a dynamic tribometer applied to piezoelectric Inertia Drive Motors – In situ exploration of stick-slip principle
0,00 € Add to downloads -

Comparison of Viscoelastic Property Characterization of Plastisol Phantoms with Magnetic Resonance Elastography and High-Frequency Rheometry
0,00 € Add to downloads
