





Piezo motors
Showing 25–30 of 35 results
-

Force Stepping Piezo Actuator : a motorised solution for high resolution positioning and external forces resistance
0,00 € Add to downloads -

FSPA and BSMA Nanometric positioning actuators for ground and space applications
0,00 € Add to downloads -

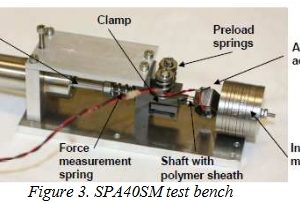
Design of a dynamic tribometer applied to piezo inertia drive motors
0,00 € Add to downloads -
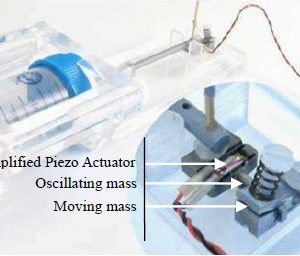
Design of a dynamic tribometer applied to piezoelectric Inertia Drive Motors – In situ exploration of stick-slip principle
0,00 € Add to downloads -
Thermal vacuum behaviour of a stepping piezo actuator
0,00 € Add to downloads -
High power density Piezo motors for critical environments
0,00 € Add to downloads
