Moteurs piézo
Affichage de 1–6 sur 37 résultats
-
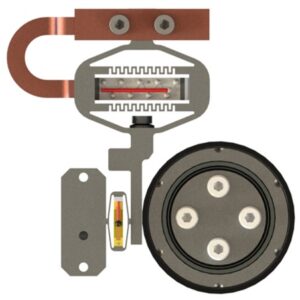
Améliorer la fiabilité des actionneurs et moteurs piézo soumis à un échauffement propre important et à plusieurs milliards de cycles de fonctionnement, ou à des conditions d’environnement extrêmes
0,00 € Ajouter aux téléchargements -
Moteurs piézoélectriques inertiels et à vis sans fin : Aspects clés de la conception et de la sélection de la motorisation
0,00 € Ajouter aux téléchargements -

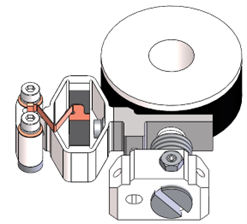
Moteurs piézoélectriques rotatifs haute résolution pour la mission spatiale LISA (Laser Interferometer Space Antenna)
0,00 € Ajouter aux téléchargements -
Micromoteur et micro-actionneurs piezoélectriques de puissances
0,00 € Ajouter aux téléchargements -
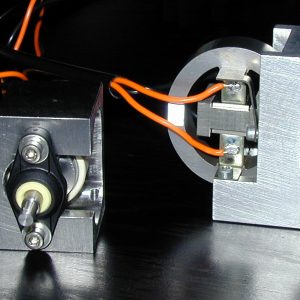
Banc d’essai modulaire pour l’évaluation des performances des actionneurs piézoélectriques de type stick-slip
0,00 € Ajouter aux téléchargements -

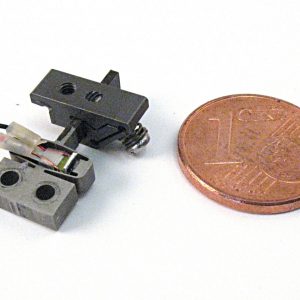
Actionneur piézoélectrique pas à pas modulaire : Un moyen polyvalent d’actionnement de micro-positionnement
0,00 € Ajouter aux téléchargements




