





Domain
Showing 109–114 of 146 results
-

Magnetically actuated fast steering mirrors
0,00 € Add to downloads -
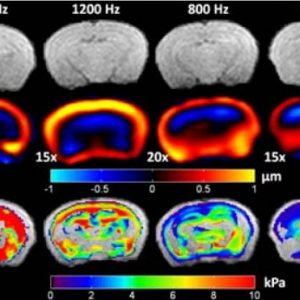
Frequency Dependence of Mouse Brain Tissue Stiffness Measured in vivo with MR Elastography
0,00 € Add to downloads -
Design and evaluation of a piezo xy stage
0,00 € Add to downloads -

From the Test Benches to the First Prototype of the muFly Micro Helicopter
0,00 € Add to downloads -
Design and tests of a demonstrator for filet compensation mechanism
0,00 € Add to downloads -

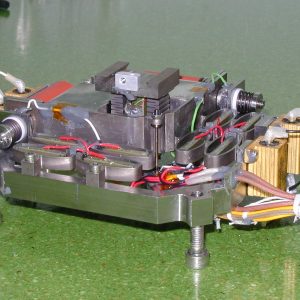
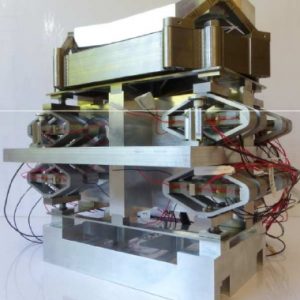
FSPA and BSMA Nanometric positioning actuators for ground and space applications
0,00 € Add to downloads
