





Active control of vibration
Showing 25–30 of 34 results
-
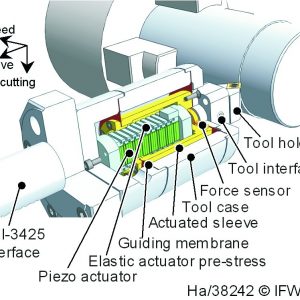
Tool adaptor for active vibration control in turning operations
0,00 € Add to downloads -

Driving control electronics piezoelectric actuators space applications
0,00 € Add to downloads -

High power force oscillator and drive electronics
0,00 € Add to downloads -

Tunable proof mass based on a pendulum structure
0,00 € Add to downloads -

Compact, Efficient and Controllable Moving Iron Actuation Chain for Industrial Application
0,00 € Add to downloads -

Self locking MRF actuators for dampers and latches
0,00 € Add to downloads
