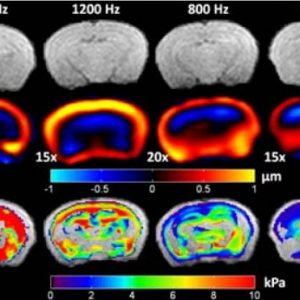
Magnetic resonance elastography (MRE) is a non-invasive imaging technique for quantitative measurement of the mechanical properties of biologic tissue in vivo [1]. The clinical interest in MRE has largely been driven by the direct relationship between tissue health and stiffness. As a result, MRE may provide significant clinical value for the non-invasive diagnosis of pathology and response to therapy by tracking tumor development and monitoring therapeutic response. MRE may also have considerable value in the development of treatment protocols in pre-clinical, rodent models of cancer. Because of cost and versatility, the mouse, in particular, is widely employed in oncologic studies. To resolve its small anatomic features, MRE experiments in mice must be performed with high driving frequencies (>600 Hz). However, high-frequency waves exhibit increased attenuation, reducing wave penetration depth and making it more difficult to impart motion deep into tissue with sufficient amplitude to overcome background noise. Also, biologic tissue is viscoelastic; hence, its response to load depends on the driving frequency. Recent MRE studies in mouse brain have been performed in high-field scanners (7 – 11.7T) at single driving frequencies of 1000 and 1200 Hz [2,3]. Here, we perform elastography in mouse brain tissue at 4.7T and report viscoelastic material properties over a range of driving frequencies (600 – 1800 Hz).