





Publications
Showing 109–114 of 213 results
-

A new amplified piezoelectric actuator for precise positioning and active damping
0,00 € Add to downloads -

Active washer for smart mechanical linkage
0,00 € Add to downloads -

Actuator based on the Thomson effect
0,00 € Add to downloads -
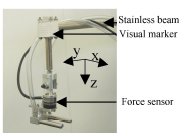
Cardiolock: an Active Cardiac Stabilizer
0,00 € Add to downloads -
Smart actuators for aircraft applications
0,00 € Add to downloads -

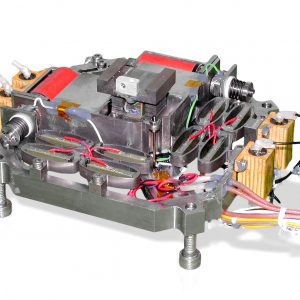
A new Rotating Voice Coil Motor for Meteosat Third Generation satellites
0,00 € Add to downloads

