Actionneurs linéaires
Affichage de 91–96 sur 155 résultats
-

Actionneurs pour les applications spatiales : État de l’art et nouvelles technologies
0,00 € Ajouter aux téléchargements -

Actionneur linéaire sans rotation
0,00 € Ajouter aux téléchargements -
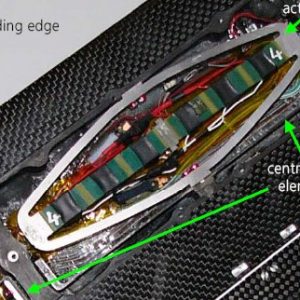
ABC Pales de rotor : conception, fabrication et essais
0,00 € Ajouter aux téléchargements -
Actionneurs en adaptronique : actionneurs piézoélectriques
0,00 € Ajouter aux téléchargements -

Elastographie à gradient constant avec des impulsions RF à contrôle optimal
0,00 € Ajouter aux téléchargements -
Couple angulaire limité pour un positionnement angulaire précis
0,00 € Ajouter aux téléchargements






