





Publications
Affichage de 193–198 sur 213 résultats
-
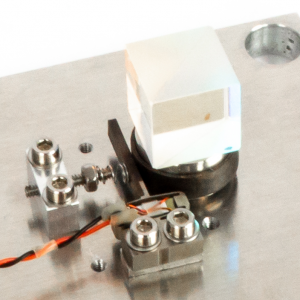
Ultrasonic Piezo Drive UPD pour une motorisation à entraînement direct
0,00 € Ajouter aux téléchargements -

Amélioration du module MSPA de l’actionneur piézoélectrique à pas modulaire
0,00 € Ajouter aux téléchargements -
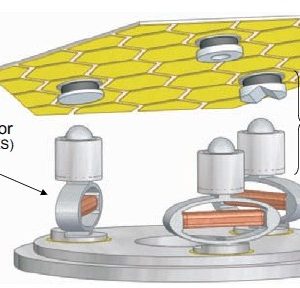
Miroirs bimorphes segmentés pour l’optique adaptative : conception de segments et expérience
0,00 € Ajouter aux téléchargements -

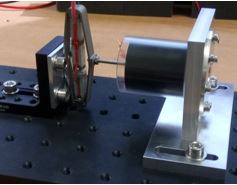
Chaîne d’actionnement à fer mobile compacte, efficace et contrôlable pour applications industrielles
0,00 € Ajouter aux téléchargements -
Amélioration du module MSPA de l’actionneur piézoélectrique pas à pas et applications industrielles des moteurs piézoélectriques
0,00 € Ajouter aux téléchargements -
Improvement of Synthetic Jet Actuator Technology for High Efficiency
0,00 € Ajouter aux téléchargements





