Degrés de libertés multiples
3 résultats affichés
-
Progrès récents en matière d’amortissement actif et de contrôle des vibrations
0,00 € Ajouter aux téléchargements -
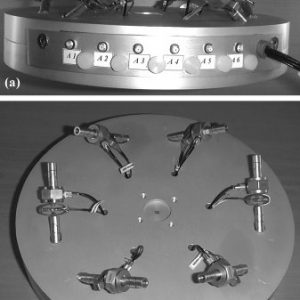
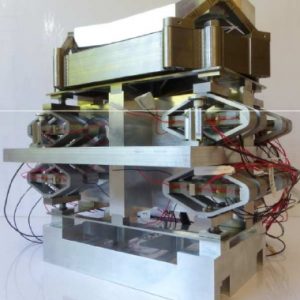
Plateformes stewart rigides et souples pour l’amortissement actif et l’isolation active des vibrations
0,00 € Ajouter aux téléchargements -
Conception et essais d’un démonstrateur de mécanisme de compensation de filets
0,00 € Ajouter aux téléchargements


