Actionneurs linéaires
Affichage de 19–24 sur 155 résultats
-

Actionneur MRF pour les applications de verrouillage et d’amortissement à force élevée
0,00 € Ajouter aux téléchargements -

Actionneurs MRF
0,00 € Ajouter aux téléchargements -
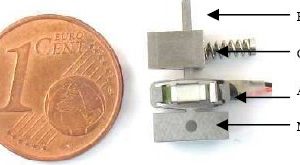
Micromoteurs compatibles avec l’IRM pour applications médicales et biomédicales
0,00 € Ajouter aux téléchargements -
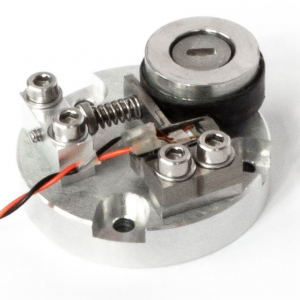
Moteurs MSPA pour mouvements rotatifs
0,00 € Ajouter aux téléchargements -
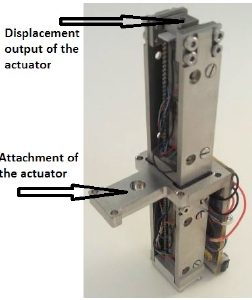
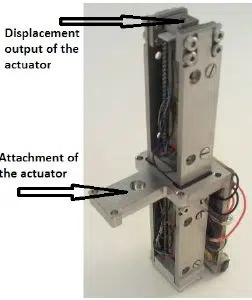
Actionneurs piezo linéaires nanométriques avec jauges de contrainte intégrées pour un positionnement de haute stabilité
0,00 € Ajouter aux téléchargements -
Positionnement nanométrique avec l’actionneur IASI-NG Beam Splitter Mechanism
0,00 € Ajouter aux téléchargements