Moteurs piézo
Affichage de 25–30 sur 35 résultats
-

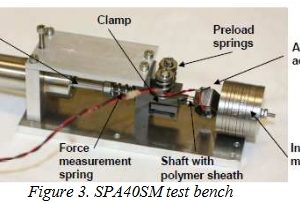
Actionneurs piezo pas à pas de force : une solution motorisée pour le positionnement haute résolution et la résistance aux forces externes
0,00 € Ajouter aux téléchargements -

FSPA et BSMA Actionneurs de positionnement nanométrique pour les applications terrestres et spatiales
0,00 € Ajouter aux téléchargements -

Conception d’un tribomètre dynamique appliqué aux moteurs piézoélectriques à inertie
0,00 € Ajouter aux téléchargements -
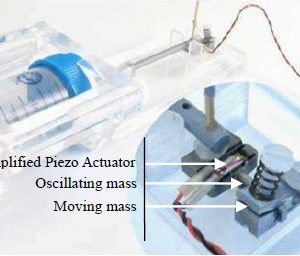
Conception d’un tribomètre dynamique appliqué aux moteurs à inertie piézoélectriques – Exploration in situ du principe du stick-slip
0,00 € Ajouter aux téléchargements -
Comportement sous vide thermique d’un actionneurs piezo à gradins
0,00 € Ajouter aux téléchargements -
Moteurs piézoélectriques à haute densité de puissance pour les environnements critiques
0,00 € Ajouter aux téléchargements






