





Publications
Affichage de 67–72 sur 213 résultats
-

Conception préliminaire d’une surface de morphing du bord de fuite pour les hélicoptères
0,00 € Ajouter aux téléchargements -
Progrès dans les transducteurs sonar magnétostrictifs
0,00 € Ajouter aux téléchargements -
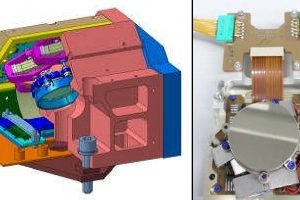
Mécanisme de guidage de faisceau ATLID et nouveaux dispositifs piézoélectriques dérivés pour des applications optiques
0,00 € Ajouter aux téléchargements -
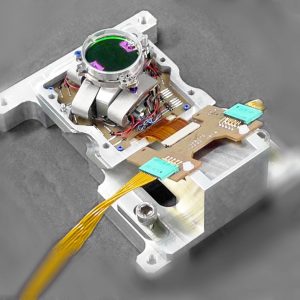
ATLID BSA Beam steering assembly piezo tip tilt
0,00 € Ajouter aux téléchargements -

Les soupapes à air pulsé à hautes performances améliorent l’écoulement aérodynamique sur les ailes d’avion
0,00 € Ajouter aux téléchargements -

Qualification du cryomécanisme du spectro-photomètre Euclid proche infrarouge – Une application du CTEC ECS
0,00 € Ajouter aux téléchargements



