


Publications
Affichage de 19–24 sur 220 résultats
-

Récupérateur d’énergie piézoélectrique bistable avec électronique embarquée de gestion de puissance pour la surveillance des infrastructures ferroviaires
0,00 € Ajouter aux téléchargements -

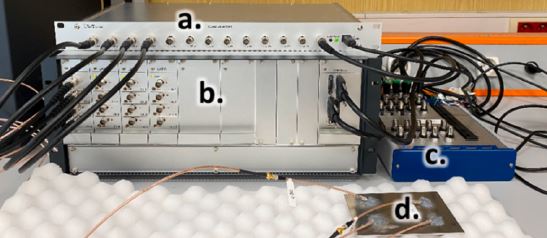
Surveillance in situ de puits de corrosion de taille micrométrique générés par voie électrochimique à l’aide d’ondes de Lamb gérées par un réseau dispersé de transducteurs piézoélectriques
0,00 € Ajouter aux téléchargements -

Système de super résolution d’images en temps réel basé sur la technologie du microbalayage
0,00 € Ajouter aux téléchargements -

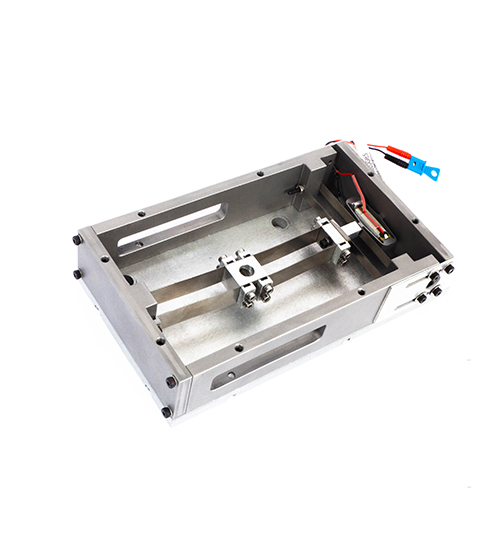
Un collecteur d’énergie vibratoire à large bande avec gestion intégrée de l’énergie conçu pour les environnements difficiles.
0,00 € Ajouter aux téléchargements -

Fabrication et propriétés des premiers actionneurs industriels APA® à base d’époxy carbone SHELLS
0,00 € Ajouter aux téléchargements -
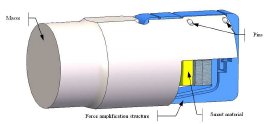
Structure mécanique avec un rapport d’amplification de force élevé pour l’application d’un capteur piézoélectrique à basse fréquence
0,00 € Ajouter aux téléchargements
