





Publications
Affichage de 133–138 sur 213 résultats
-
Actionneurs, transducteurs et moteurs basés sur des matériaux magnétostrictifs géants
0,00 € Ajouter aux téléchargements -

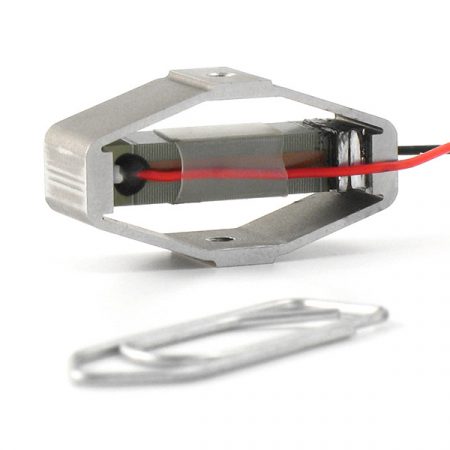
Actionneur mobile à bobine vocale compatible avec l’espace
0,00 € Ajouter aux téléchargements -

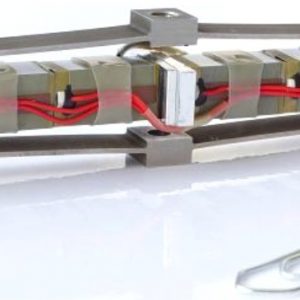
Capteurs de position sans contact pour mécanismes spatiaux basés sur la détection des courants de Foucault
0,00 € Ajouter aux téléchargements -
Tomoélastographie rapide du cerveau d’une souris par élastographie RM multifréquence à tir unique
0,00 € Ajouter aux téléchargements -

Tribomètres spatiaux : Conception pour des expériences exposées en orbite
0,00 € Ajouter aux téléchargements -
Avantages des actionneurs piézoélectriques de grande taille et des pilotes de haute puissance pour les essais de fatigue et de fretting
0,00 € Ajouter aux téléchargements



